Vine-inspired robot fingers can reach out and grab someone
The new design could be adapted to sort warehouse products, unload heavy cargo, or help lift patients out of bed.
In the horticultural world, some vines are especially grabby. As they grow, the woody tendrils can wrap around obstacles with enough force to pull down fences and trees.
Inspired by vines’ twisty tenacity, engineers at MIT and Stanford University have developed a robotic gripper that can snake around and lift a variety of objects and even people, offering a gentler approach than conventional gripper designs.
The new bot consists of a pressurized box from which long, vine-like tubes inflate and grow. As they extend, the vines twist and coil around the object before continuing back toward the box, where their tips are automatically clamped in place and they are mechanically wound back up to gently lift the object in a sling-like grasp.
The researchers envision applications from agricultural harvesting to loading and unloading heavy cargo. In the near term, they are exploring uses in eldercare, such as helping to safely lift a person out of bed. Often in nursing and rehabilitation settings, this transfer process is done with a patient lift, which requires a caretaker to maneuver the person onto a hammock-like sheet that can be hooked to the device and hoisted up. This manual step is unnecessary with the robotic system.
“Transferring a person out of bed is one of the most physically strenuous tasks that a caregiver carries out,” says Kentaro Barhydt, a PhD candidate in MIT’s Department of Mechanical Engineering and one of the lead authors of a paper on the work. “This kind of robot can help relieve the caretaker, and can be gentler and more comfortable for the patient.”
The key to the system, whose design was developed by Professor Harry Asada’s lab at MIT and Professor Allison Okamura’s lab at Stanford, is that it combines “open loop” and “closed loop” actions. In an open-loop configuration, a robotic vine can grow and twist around an object, even burrowing under someone lying on a bed. Then it can continue to grow back toward its base and attach to a winch, creating a closed loop that can be retracted to lift the object.
“People might assume that in order to grab something, you just reach out and grab it,” Barhydt says. “But there are different stages, such as positioning and holding. By transforming between open and closed loops, we can achieve new levels of performance by leveraging the advantages of both forms for their respective stages.”
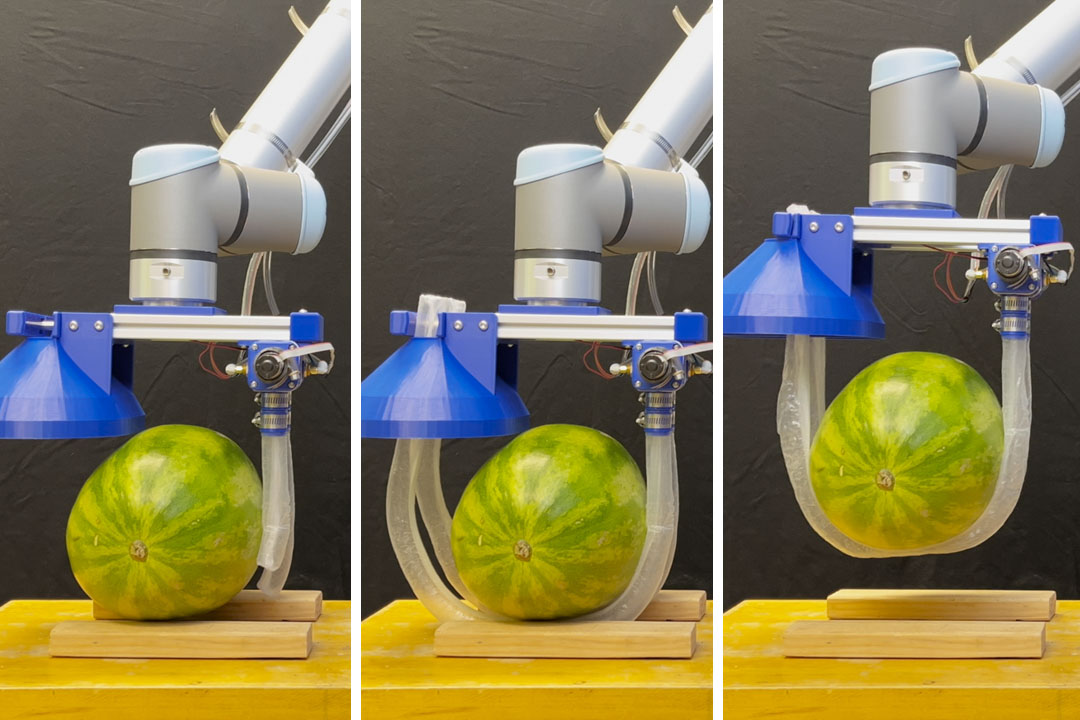
While the team’s design was initially motivated by challenges in eldercare, it can also be adapted to other grasping tasks. A smaller version has been attached to a commercial robotic arm to lift a variety of heavy and fragile objects, including a watermelon, a glass vase, and a kettlebell. The vines can also snake through a cluttered bin to pull out a desired object.
“We think this kind of robot design can be adapted to many applications,” Barhydt says. “We are also thinking about applying this to heavy industry, and things like automating the operation of cranes at ports and warehouses.”
Keep Reading
Most Popular
OpenAI is throwing everything into building a fully automated researcher
An exclusive conversation with OpenAI’s chief scientist, Jakub Pachocki, about his firm's new grand challenge and the future of AI.
How Pokémon Go is giving delivery robots an inch-perfect view of the world
Exclusive: Niantic's AI spinout is training a new world model using 30 billion images of urban landmarks crowdsourced from players.
Inside the stealthy startup that pitched brainless human clones
Inside Chicago’s surveillance panopticon
For many people, life in and around Chicago means near-constant surveillance in the name of public safety. Meet the city residents engaging with this controversial space.
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.